


How Internet of Things Can Improve Our Systems
In recent years, Internet of Things (IoT) has been steadily growing in popularity for its advantages in delivering real-time data to a remote location. While the manufacturing industry benefits the most from IoT, other fields can also utilize them to make things easier.
Author: Soh Wei Xiang
Date: 3rd June 2021


Have you thought of the cost incurred when machines breakdown, production is delayed, and time taken to troubleshoot the system if Internet of Things (IoT) devices does not come into play? This could amount to thousands of dollars lost for each day it is unresolved. IoT devices can help to prevent them by providing real-time data and sending it to the cloud platform. Managers can verify offsite if the production line has any anomalies based on this data, allowing a transition to autonomous monitoring and enable early detection of potential issues. In other industries like agriculture and healthcare, real-time monitoring brings about quicker response to maintain the health of the plants and people respectively.
With the current COVID-19 situation, this article will briefly cover on 3 components used in an application to dispense water bottles to people while collecting data. These components are the TeraRanger Evo 60m, a Collaborative robot called Sawyer and ThingSpeak respectively.
Components Used in the Setup
TeraRanger Evo 60m Sensor
Terabee develops a wide range of sensor modules that can be applied into many applications like Internet of Things, mobile robotics and industrial automation. It can be categorized into distance sensors of varying range, thermal cameras for temperature monitoring and their Time-of-Flight depth cameras to capture movements. Despite its long range, TeraRanger Evo 60m Sensor with an I2C backboard is used in this setup.
Sawyer
A collaborative robot design by Rethink Robotics that has a complete system embedded into its frame. With its robot positioning system, force sensing and training by demonstration capabilities, it is designed for fast implementation with minimal programming knowledge.
ThingSpeak
There are several IoT cloud platforms one can choose from, but ThingSpeak was chosen because it is available for free with an update interval limit of 15 seconds and 4 channels to upload data. Purchasing the license will provide the full capabilities it has to offer, improving the update limit to 1 second and having more channels, just to name a few. You can also do visualization and online analytics of the data by using the built-in or desktop version of MATLAB..
Arduino Uno WiFi Rev2
Arduino Uno is an open-source microcontroller suitable for anyone, experienced or not, in creating their own projects. It is also useful for fast prototyping for testing purposes. This board was chosen due to its integrated WiFi capability, to act as a gateway to upload sensor data to the cloud platform.
Others
A resistor and LED is included to indicate if a signal is sent from the Arduino to the Sawyer.
Terabee TeraRanger Evo 60m

Suitable for both indoor and outdoor usage, the TeraRanger Evo 60m has the longest range of all Terabee Time-of-Flight (ToF) sensors, up to 60 meters. With a field of view of approximately 2°, it weighs from 9 grams and have a compact size of 29 x 29 x 22 millimeters. Additionally, it is CE certified to be eye safe.
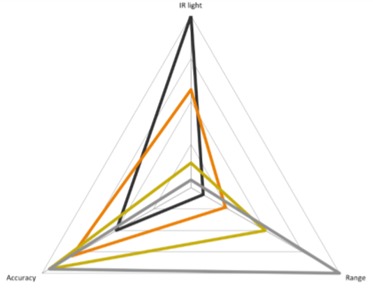
ToF sensors uses the time for photons to travel between two points to calculate its distance (A Brief Introduction to Time-of-Flight Sensing: Part 1 – The Basics, 2021). Like all sensors, there are various factors that can potentially affect its maximum range and update rate. Based on a test report by Terabee, there is a correlation between the Near-Infrared (NIR) light with accuracy and range as seen in the image on the right (Test Results Report, 2018). In addition, the reflectivity of the target surface can also affect the distance measured, possibly coming from other objects (A Brief Introduction to Time-of-Flight Sensing Part 2 – Indirect ToF Sensors, 2021).
For the experiment, the location is conducted indoors with most environmental conditions constant. Thus, this sensor is chosen with the benefit of operating even in low light and complete darkness. For more information on how ToF sensing works, please visit Terabee website for their Time-of-Flight articles.
Rethink Robotics Sawyer

Known for its flexibility and easy application, Sawyer is delivered as an out-of-box Cobot solution equipped with two integrated cameras for robot positioning system and high-resolution force-sensing capabilities (Rethink Robotics, n.d.).
Sawyer has 7 degrees of freedom with a reach of 1260 mm, capable of carrying payloads up to 4kg with 0.1mm task repeatability. This Cobot can be directly trained by demonstration and is specifically designed for workers with no specific technical skills or programming required. To access all its functionality, connect a laptop to the Cobot to start programming on the Intera Studio interface.

Intera graphical user interface is quite simple and intuitive to use, using symbols and icons that are easy to understand. It also has a function of loading templates for fast programming of simple applications. For researchers, there is the Sawyer SDK to explore possibilities this Cobot has to offer. For more information, there are several papers and links available on Rethink Robotic’s website (Community Research, n.d.). In an upcoming Intera update from version 5.3.1 to 5.4.1, users will be able to adjust the collision detection sensitivity for more sensitive applications.
Because Sawyer is inherently designed for safe, collaborative operation with humans, it is used in this experiment and programmed through its local software.
ThingSpeak

Due of the limitations from using a free licensed account on ThingSpeak, the fastest data upload used in this experiment is capped at 15 second interval. Recall that the purchase license mentioned previously will be beneficial for applications that require real-time data.
This experiment will use an alternative method to work around this restriction. Arduino is programmed to store the data measured each second and upload the batch data to ThingSpeak every 15 second interval. If viewed directly on the Arduino serial monitor, a HTTP status code “202” will be returned each time the data is uploaded successfully. An image is provided in the results section of this article.
The code for this component was adapted from GitHub and MathWorks examples (Afan31, 2020) (Prototyping with Sonar Proximity Sensor, 2021).
Experiment Setup

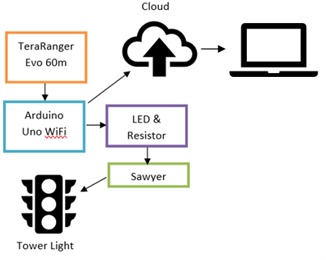

In this setup, the sensor is attached to the side of the table near the entrance facing a white colored wall. This distance measured is approximately 1060mm wide. The Arduino is programmed to send a signal to the Cobot once the measured distance has dropped below a certain value, which is set at 700mm. The LED will be a physical indicator when it happens. This signal will prompt the Cobot to begin its task dispensing water bottles to the person who approaches the table. To signal the individual when to grab the bottle, a tower light with red, yellow and green colored LEDs is attached to the Sawyer.
An image of the wiring connection between Terabee and Arduino is shown above. Please refer to the sample code available on GitHub for the programming (Terabee Sample Codes, n.d.).
Results gathered in ThingSpeak

A graph is generated from the uploaded data sorted by its timestamp. The period where the Cobot was activated is indicated in the images on the right. From this graph over a 1-minute period, the frequency that the Cobot is activated and when it happens can be understood. This drop in distance can also translate to the number of bottles dispense or the number of people who approached the Cobot.
In total, 3 bottles have been dispensed to people by the Cobot within this timeframe, where the value will return to its peak when the individual have walked away. It is noted to have a slight delay when uploading the data to ThingSpeak as indicated by the blue arrow.
If this application were to run for the whole day and study the data, we can understand when the peak periods is, how high is the human traffic, and how the process can be improved. This set of data can be exported out of ThingSpeak for our own analysis or you can feed it to MATLAB as it comes in. By adjusting this setup slightly, it can turn into a people counting application. Just by having a sensor installed at both the entrance and exit, finding out the number of people within that area at any time can be easily found.
Summary
To conclude, standard applications can be done more efficiently with the use of IoT technology. In terms of manufacturing, installing sensors at key locations can provide early detection of potential issues from developing into a bigger problem, and can be implemented in other fields. With the correct setup and components, any data can be collected for further study and optimization. If you are interested to find out more, please feel free to contact me anytime.
Reference
1. A Brief Introduction to Time-of-Flight Sensing Part 2 – Indirect ToF Sensors. (2021, April). Retrieved from https://www.terabee.com/a-brief-introduction-to-time-of-flight-sensing-part-2-indirect-tof-sensors/ 2. A Brief Introduction to Time-of-Flight Sensing: Part 1 – The Basics. (2021, April). Retrieved from https://www.terabee.com/a-brief-introduction-to-time-of-flight-sensing-part-1-the-basics/ 3. Afan31. (2020, Dec 10). ThingSpeak-Arduino. Retrieved from https://github.com/mathworks/thingspeak-arduino/blob/master/examples/ArduinoUnoWiFi%20Rev2/WriteSingleField/WriteSingleField.ino 4. Community Research. (n.d.). Retrieved from https://sdk.rethinkrobotics.com/intera/Community_Research 5. Prototyping with Sonar Proximity Sensor. (2021). Retrieved from https://www.mathworks.com/help/thingspeak/prototyping-with-sonar-proximity-sensor.html 6. Rethink Robotics. (n.d.). Meet Sawyer. Retrieved from https://www.amaasia.net/product%20PDF/Sawyer-Datasheet.pdf 7. Terabee Sample Codes. (n.d.). Retrieved from GitHub: https://github.com/Terabee/sample_codes 8. Test Results Report. (2018, Sept). Retrieved from https://www.terabee.com/wp-content/uploads/2019/04/TeraRanger-Evo-60m-Test-Results-Report-Outdoor.pdf